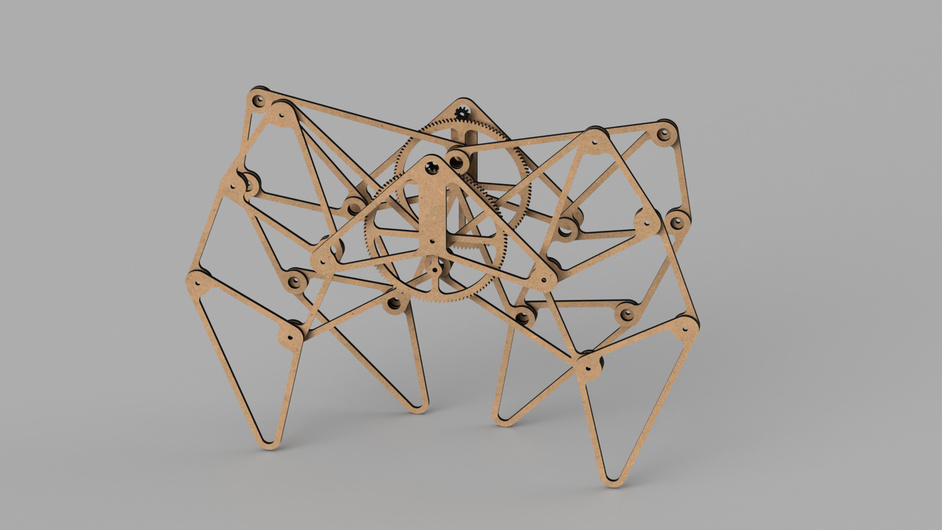
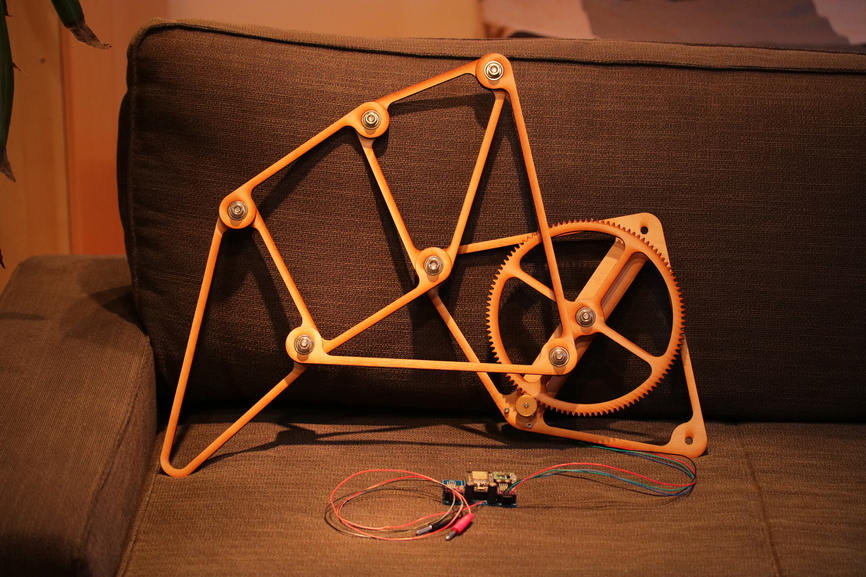
As one of my bigger projects when my glowforge arrives, I’m planning a strandbeest like robot. I currently built one half of it (4 legs, will have 8 in total) in Fusion, and I’m satisfied with the motion and style, so I thought I’ll drop it here.
This will be quite big (about 60cm tall), and my hope is to be able to drive each half at a different speed, to walk in curves (should still be stable, but only just so for the worst-case phase shift). It will use M8 rods and nuts and 608 bearings (9 per leg, 2 per leg pair → 80 bearings).
Note that the dimensions are not the classic Janssen set, but the ones optimized by @Scott.Burnshere. The Fusion file is parametric, so I can switch the measurements out, and still get a working model - only the joints tend to freak out a little.
This is super-cool!
It’s neat that you’re going with eight-total legs rather than Janssen’s six! It changes some of the skid-steer behavior and I’ll be excited to see your progress!
That looks awesome! I’d love to build one of these.
I’m concerned that the individual connectors look too thin, depending on the material you pick. If this is MDF (like your render seems to shows), there will probably be some flex in parts that thin. You may want to thicken up the parts a bit, or add some more edges between the corners to give them more support. Hopefully that is a parameter in your file. It does not look like making those connectors thicker would impact the functionality.
What a delightful animation! If it moves fast enough, you might be able to keep it balanced upright on two toes while the other two move to new positions. I’m guessing it would have to really scramble! Maybe adding mass to the rotating wheels would add stability?
Yes, both “width” and “thickness” are parameters. Currently the thin parts are 10mm wide and everything is 7mm thick (matching the bearings). I like the airy feel of it, if MDF is not sturdy enough, I’ll try plywood or multiplex. But yes, if nothing else works, I can easily widen those parts.
Looking forward to your build. I got four of the five legs printed and then BAMF intervened. I need one more piece of that thickness plywood. Have no idea about what locomotion will entail at this point. Hope you get a Glowforge soon.
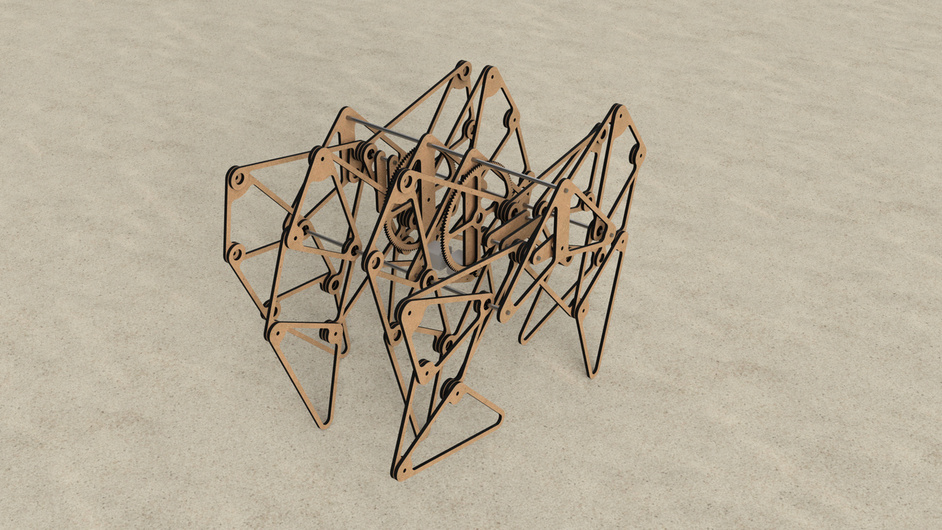
So I learned about subcomponents in F360. Especially how they behave when copied around (vs. copying the bodies alone). And paste vs. paste new.
At first, I didn’t plan to add the second strandbeest half in Fusion. But with these new skills, it should be a simple copy and a few additional joints - if the original file were structured better. So I reconstructed the file (reusing the base parts), with a component hierarchy that allows maximum reuse.
Changes in this version (apart from a much better structured file):
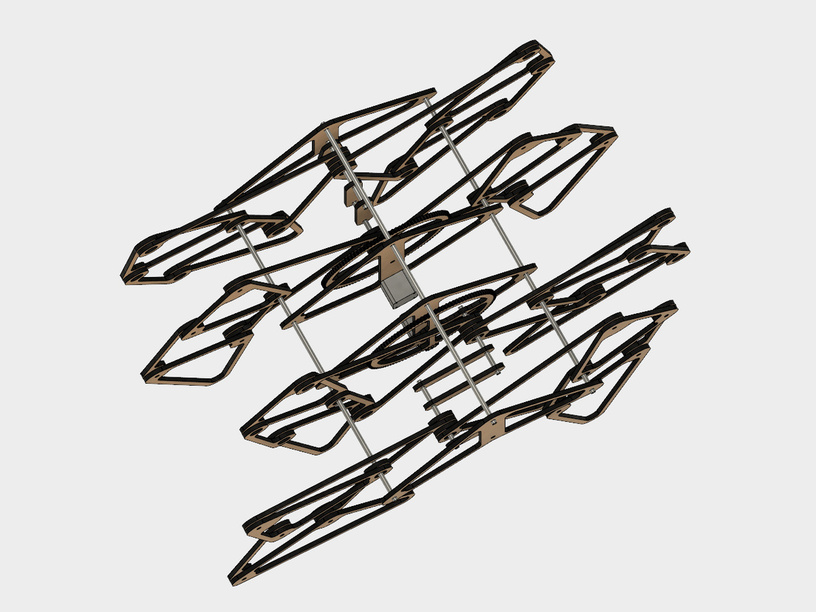
drive mechanism is placed at the bottom (lower center of gravity)
only a single big gear per side, saves a lot of space when thinking about motor placement
instead of the second gear, there is now a “crankshaft” of sorts
added the second half (trivial in the cleaned up file)