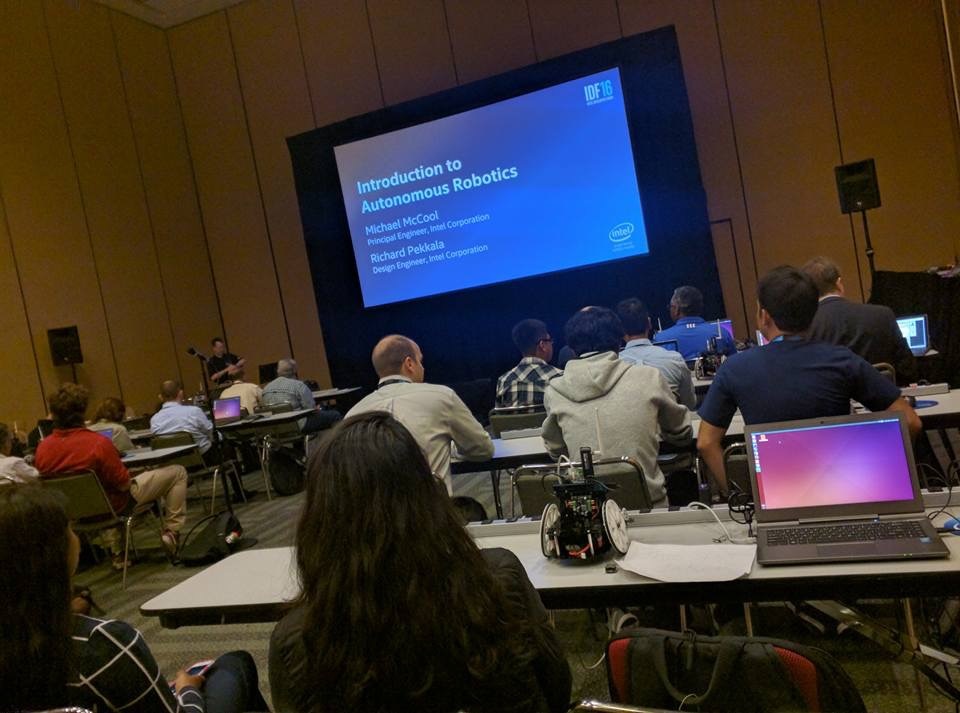
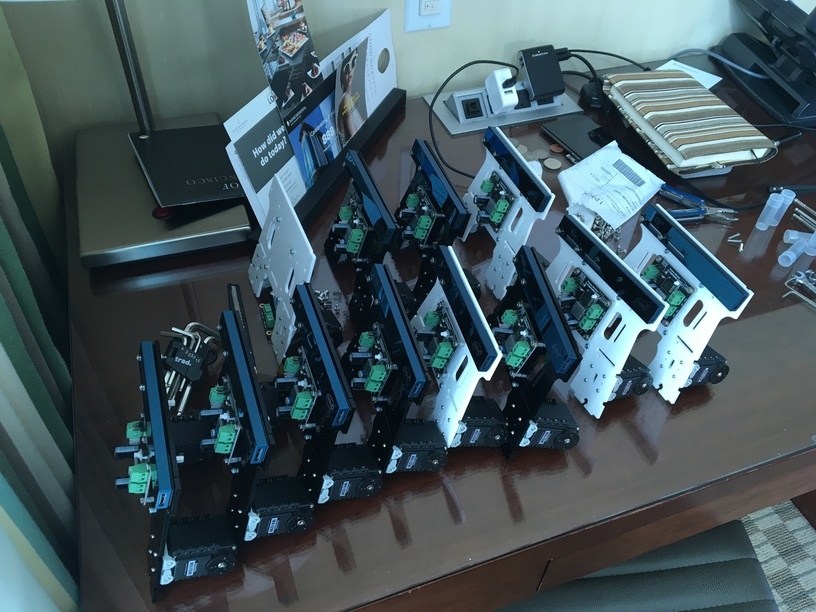
I work for Intel and have been working on developing reference designs for autonomous robots (that is, robots capable of sensing their environment and navigating by themselves) using the RealSense 3D depth camera. I recently used a dozen of my robots, which uses a laser-cut frame, at the Intel Developer Forum in San Franscisco to give a hands-on lab.
A bit on my design process: I use OpenSCAD for the 3D modelling. This is a free procedural modelling system that lets me do useful things like intersect one plate with another in 3D so I can match up slots and tabs exactly. I can also do offsets and adjust bolt hole sizes precisely. I export the files as DXF and then import them into Inkscape to lay them out, and also to color them to control the cutting order (it is important for precision to cut interior features first before cutting the outer boundary and freeing the part from the sheet). I am currently using a Trotec laser cutter at my local makerspace, DMM.make in Tokyo, but am impatiently waiting for my GlowForge so I can work from home.
I should note that I cut parts in both Acyrlic and Delrin (aka POM or Duracon or Acetel). Acrylic is cheap and comes in a wide variety of colors both transparent and opaque, but can be brittle. For more durability I am now using Delrin, which also raises interesting possibilities for flexible joints so entire linkages (eg for grippers) can be cut rather than assembled.
I do intend to open-source the hardware and publish it in places like Thingiverse but also want someone to sell and produce a kit. The catch is getting both to happen at the same time…
Likewise there is a significant software component to this project (based on ROS) that I am working within my company to open-source.
Regarding Delrin: Delrin is tougher and more flexible than MDF or wood so living hinges would work fine. In fact the cuts can be thinner than with those materials. You can also do things like snap-fits. In contrast both living hinges and snap-fits are problematic with acrylic which would rather break than bend.
Just curious, as I use OpenSCAD and Inkscape, why you export to DXF instead of .svg for importing into Inkscape? Is there an advantage or is it just what you do?
Really nice looking design! I would love to build one of your robots. Regarding acrylic and its brittleness – in another post I had recommended that people try Acrylite. Cuts like acrylic, but it’s not nearly as brittle. You might want to give it a try as another option.
Good point about acrylite. As it happens that was what I was using. I didn’t even realize it until recently. I had a big bulk order of “acrylic” sheet that I was working through, but then I ran out and had to buy a couple more sheets from the makerspace to finish one of my robots.
Well, the stuff from the makerspace was absolutely horrible. In particular it would start cracking given the slightest opportunity, particularly at sharp interior corners (fortunately I intentionally avoided those in my designs… mostly).
After your comment I went back and looked and sure enough, the “good stuff” from my original batch was actually acrylite.
My opinion: regular acrylic is nearly useless as a structural material, but acrylite is tolerable. Unfortunately when you try to order sheets online from places like Amazon they are often not distinguished.
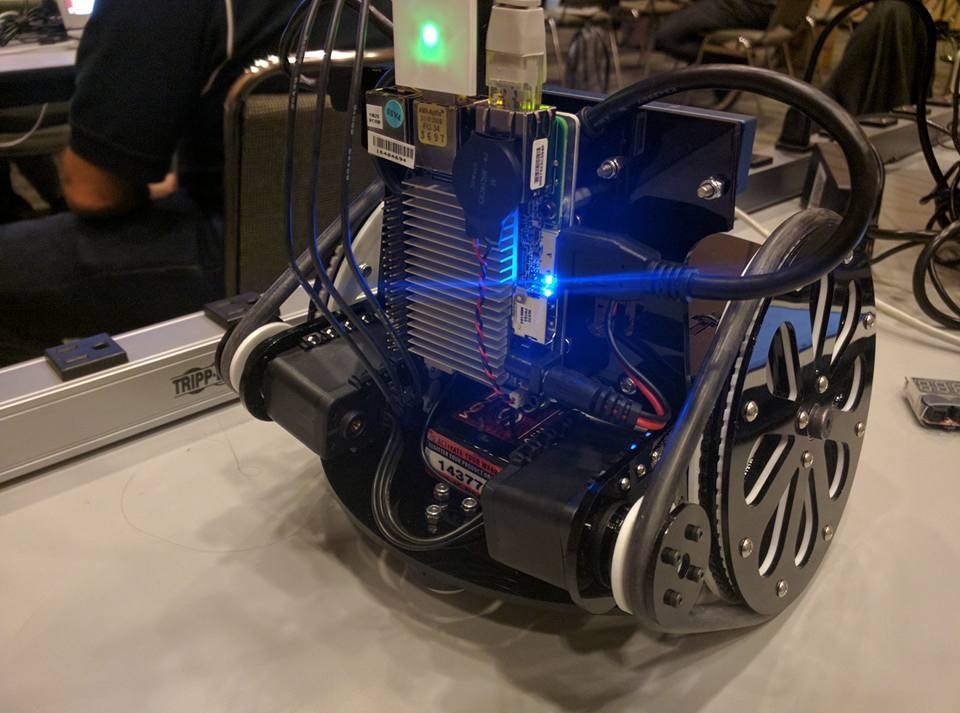
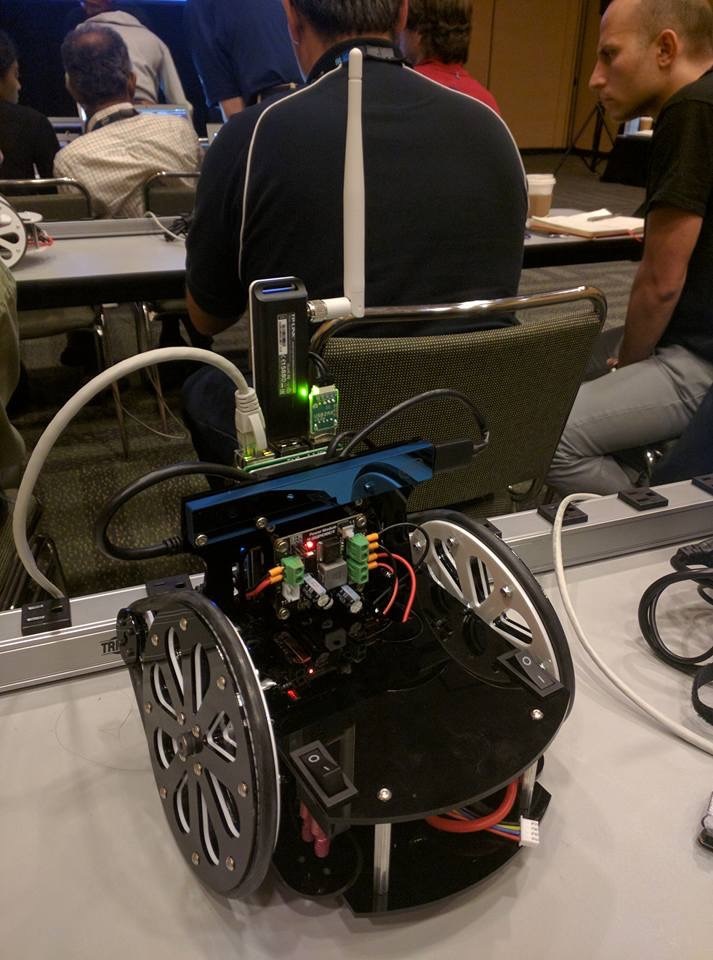
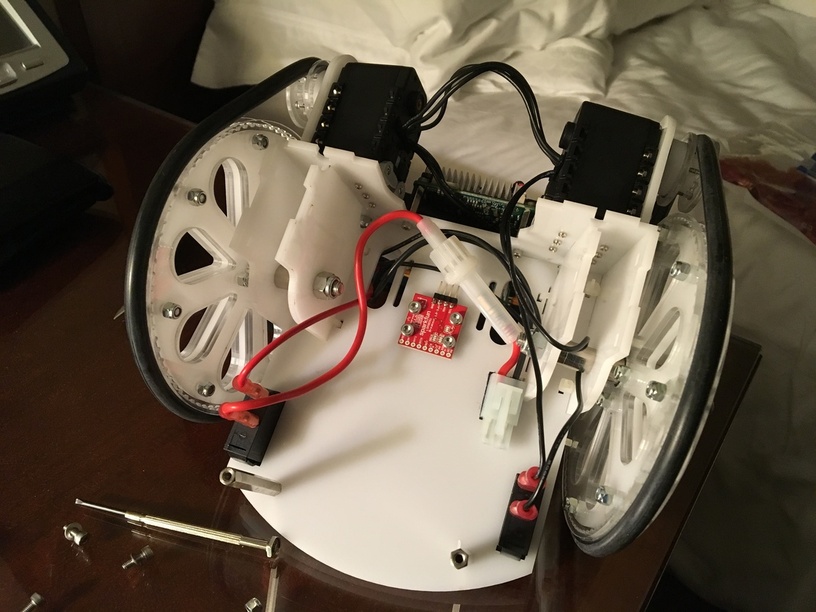
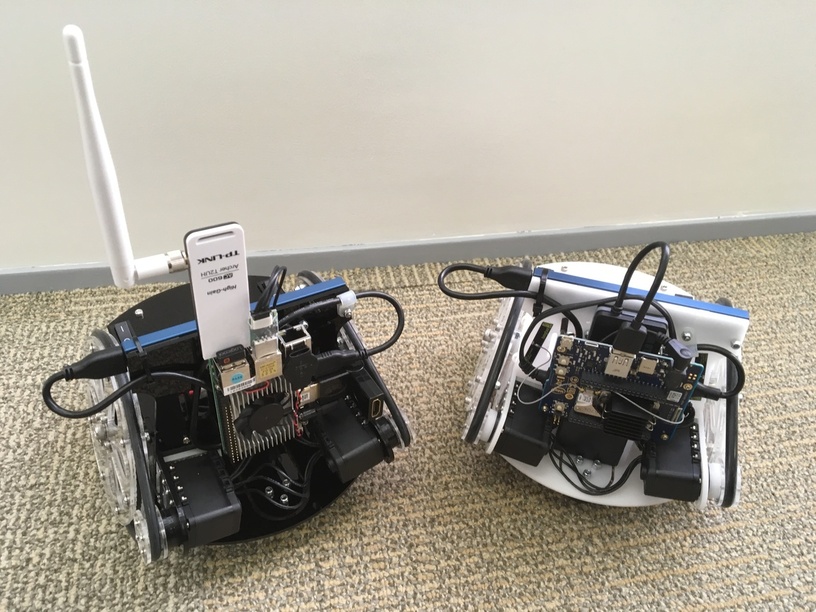
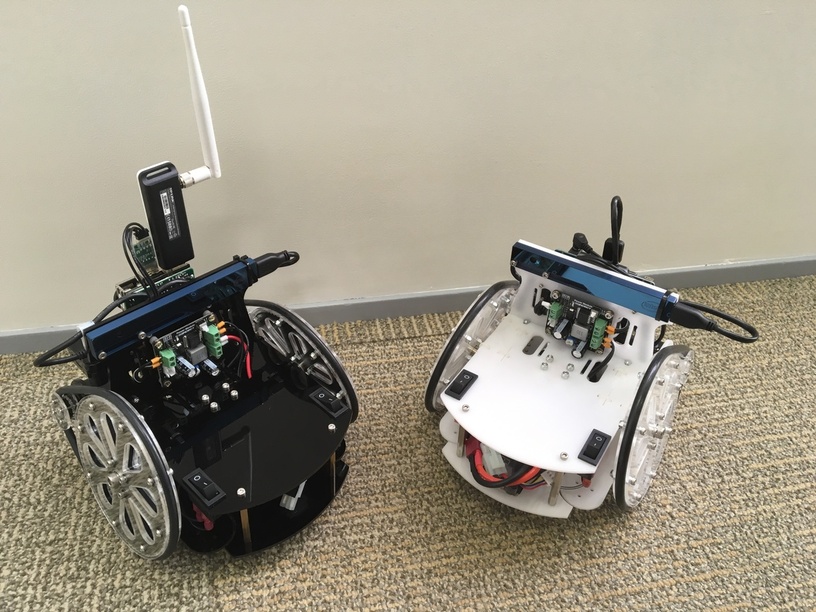
BTW new robots. The white one uses POM (Delrin/Duracon/Acetel), the black one is “Acrylite.”
Also the white one uses the new Intel Joule compute module Intel just released, the black one uses the Intel RealSense Robotic Development Kit and the UP Board from Aaeon.
Both are going to be shown in the Intel booth at ROScon in Seoul in early October.
The transparent parts are where I picked up the horrible regular acrylic and discovered the difference between it and Acrylite…
That’s so amazing. I see things like this and Battle Bots and wish that I had the drive to create stuff like this. I can figure out the knowledge, but you have to have that drive… and funds.
Thought I replied to this but I don’t see it on the forum, so let me try again.
I tried exporting SVG first from OpenSCAD but for some reason the units were not preserved, so the drawing was scaled. If I go the DXF route, then import to Inkscape, then export to SVG, the units are preserved. If someone gets around to fixing the bug in Inkscape and/or OpenSCAD then going the SVG route would be preferred.
One issue of going through DXF is that everything is broken into zillions of separate line segments. You have to select all the endpoints and do an endpoint “merge” in Inkscape to get continuous lines suitable for cutting. This and the coloring I mentioned means that a little bit of manual cleanup work is unfortunately needed… in theory these steps could probably be automated, though.
I should also mention that before you export from OpenSCAD you should push up the subdivision setting ($fn in circles, spheres, cylinders etc) to get enough resolution for smooth curves. I usually leave it at a low value during design then push it up only for the export. Although SVG supports B-splines OpenSCAD is a polygon-based modeler internally, so…
Preserving units is something to think of. I have to remember to set the document preferences first in the Inkscape workspace before importing an svg from Sketchup.