Grabbed some of this stuff to mess around with. Still messing with laser settings (and I just realized I’ve been using 0.0625 for the thickness but it’s actually 0.020" duh). But I am pretty pleased with the results so far. Having no idea what settings to use, I picked “thin leather” as a starting point. I had to bump the power up a tiny bit (like 10%) after my first attempt.
15 Likes
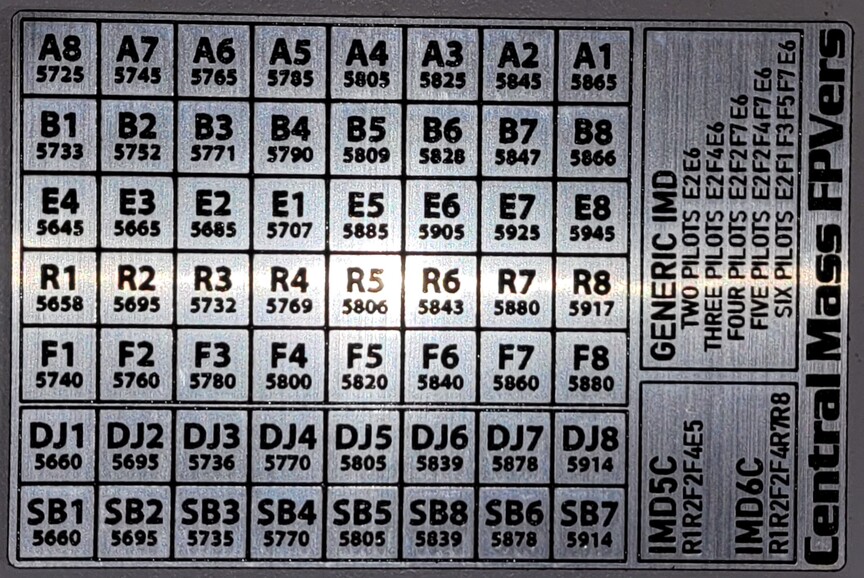
For anyone scratching their heads on what this is… “FPV” is flying radio controlled models (usually “drones”) using a live video feed transmitted from the model. The pilot (me) wears video goggles to view the feed during flight. We race these things, so everyone in a race has to have their own frequency to transmit their video on. The problem is that when two or more transmitters are operating in close proximity (frequency-wise), they generate an interference frequency that is a function of the primary frequencies in use. Some combinations of frequencies produce interference on another legitimate video channel. So we have to select the frequencies being used to ensure they don’t generate interference with each other. This interference is called “IMD” or Intermodulation Distortion". The card shows all the frequencies that can be used on each channel, as well as the “ideal” frequencies to use if multiple fliers are flying at the same time.

8 Likes
Oh, the irony – after many decades of AM/FM “frequency board” use at RC flying fields, the spread-spectrum revolution at 2.4 GHz all but freed us from the worry of crosstalk for aircraft control for about a decade, but FPV has brought us full circle. Progress? 
4 Likes
Ouch. Hit the nail right on the head with that one. 
1 Like
We really need to quit calling RC multirotor “drones”, that is majorly sexist. Only half kidding.
2 Likes
Yeah. But if I say “quads” most people think I’m riding a glorified golf cart. So I go with the common vernacular “drone” in non-quad-flying situations.
2 Likes
This turned out great!
2 Likes