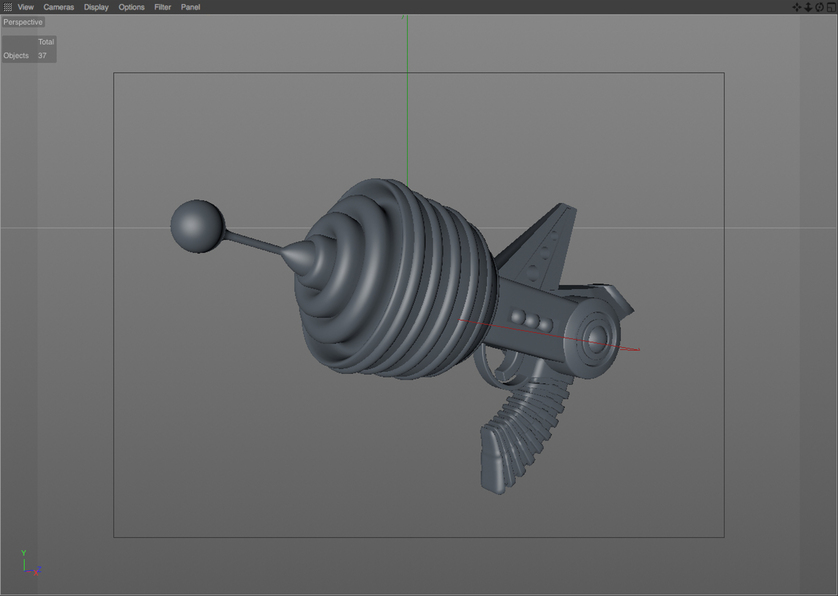
I finally had some time to start playing around with creating depth maps for the purpose of 3d engraving. I started with some of the sample 3d models i have in Cinema 4D.
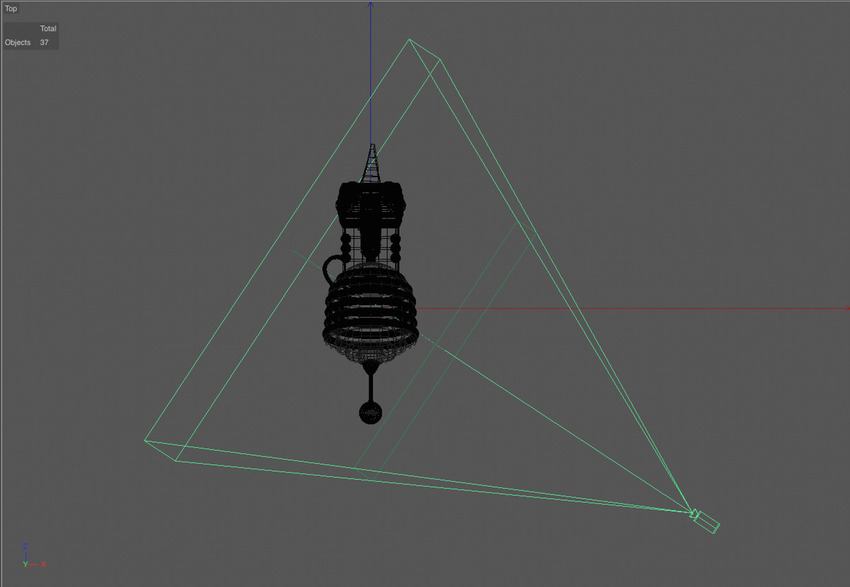
Then it was just a matter of getting the camera setup right so that the focus area was just slightly larger then the 3d object. This will hopefully give me as much detail as possible in the final depth map.
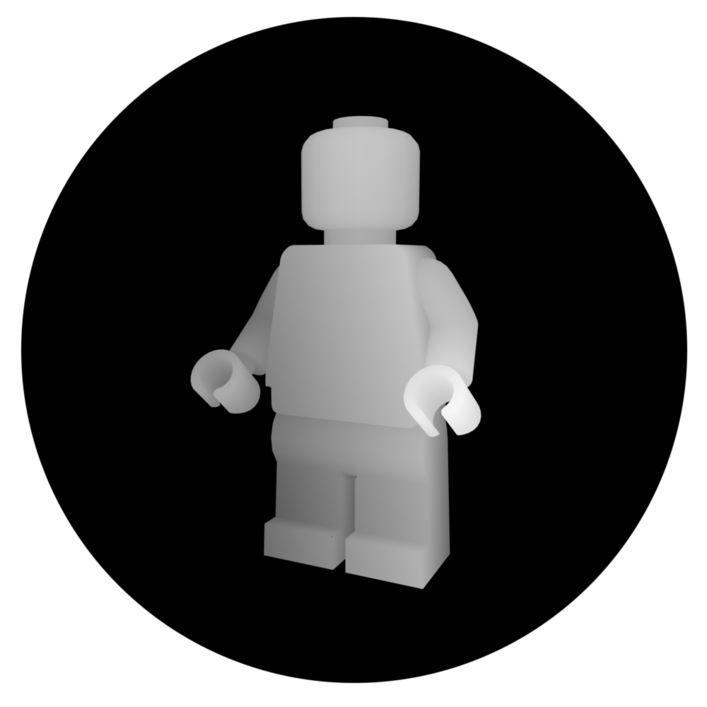
Here is a few of the models that i rendered out. The detail looks pretty good but i can wait to see how well they engrave. Anyone with a pre-release or beta unit that wants to test them go right ahead.
Suggestion - there’s enough texture in the wood that you need a fair bit of contrast to be visible. If a feature is less than clear to the eye in the bitmap, it will be hard to resolve in the final engraving. For example, the mirror in the foreground, the windows, the wipers, etc are likely to get lost. You might consider sharpening and increasing contrast to help with this.
Ya i was thinking i would need to do a fair amount of trail and error to figure out what would work and what wouldn’t. The next step will be starting to create some models especially for 3d engraving. I’ll try and keep those fairly contrasty. I’ll post those here once I have something cool to look at.
I did have a question about adding visual contract to areas of the 3d engrave. Say i wanted to engrave something like a soccer ball that had light and dark panels. How should i go about something like that. Would i need to engrave a depth pass to give it is shape and then a lighter engrave to add the color to the darker areas? And would i need to clean off the smoke residue before doing the light engrave?
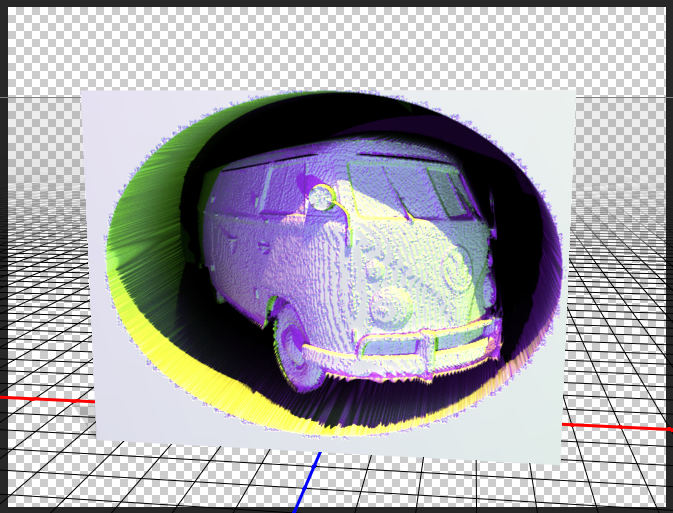
I’ve been using photoshop to try and visualize the output from depth-maps.
Here is what it does with rendering your VW image (silly colored lighting is the preset named “mardi gras”)
I used to make these in Bryce 3D when I was a kid. They always reminded me of those 3D books where you cross your eyes to make an image pop out. In the back, the answer guides were usually similar to a depth map image.