After a power cycle, and calibration, it is still doing the same thing.
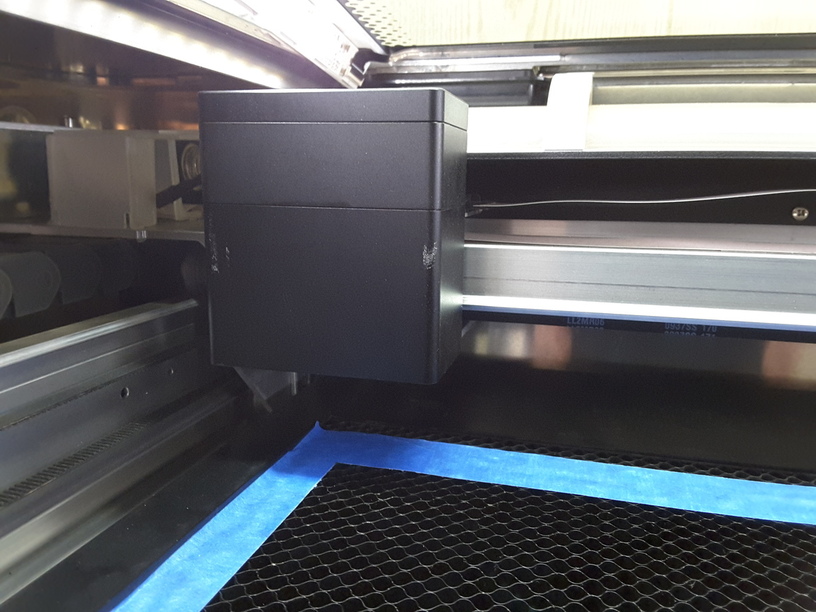
You can see the head hit the door when it reaches the end of it’s Y move, and then it appears to tip back to normal after it begins the X move.

Here are the witness marks on the head:
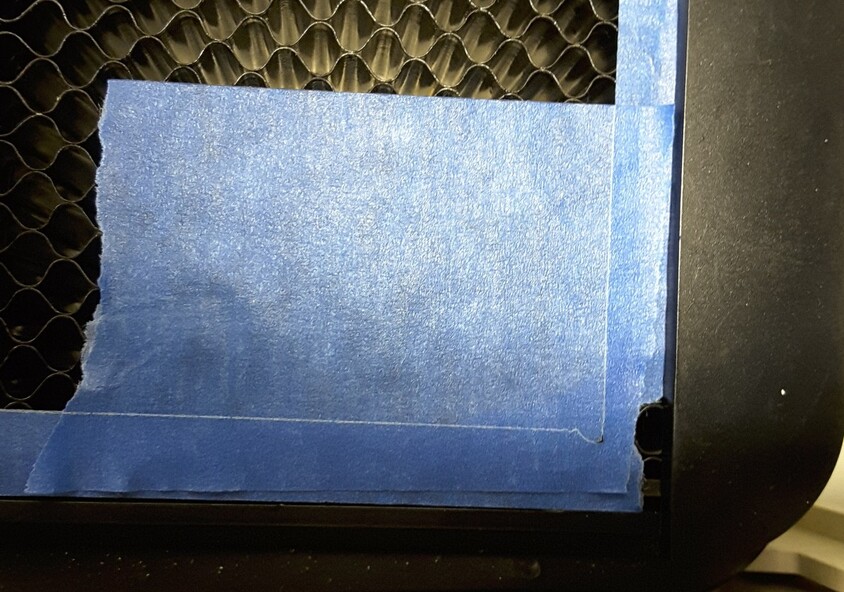
Here is the result of the bump on the cut:
As a side note, of little importance: I did about 10 power cycles yesterday testing repeat-ability of the homing process (around ±.004" on my machine, not bad…). And the sequence was: Y-move to center, 1 or more (this varied from 1 to 3) X-Moves to center, quick adjustment jump to center, X- to left, Y to rear.
Just now, it was X-Y move to near center (single move), quick adjustment jump to center, and the normal return to rear left. So, it appears there may have been a cloud software homing sequence change between then and now.