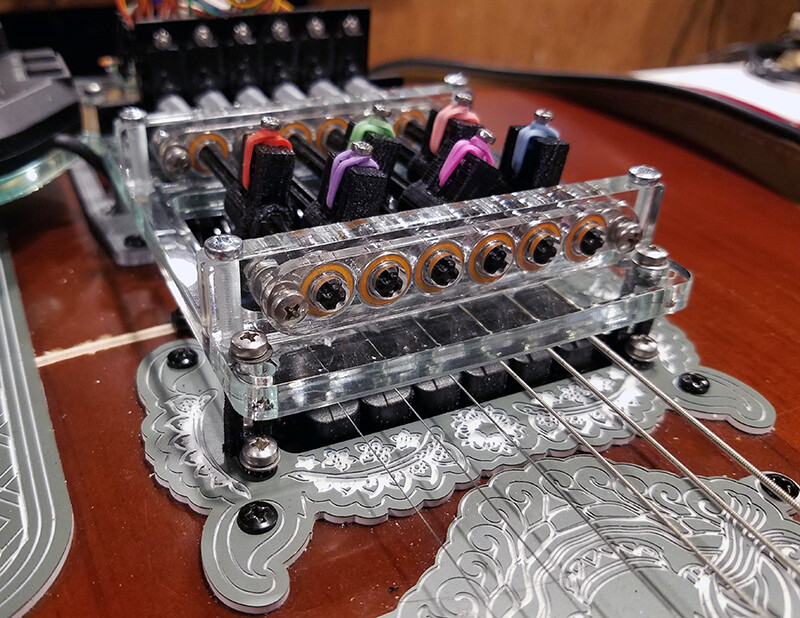
This is a guitar-picking robot. It’s not a machine that plays a given tune (I think that would be boring) a human still needs to fret the notes. It’s an extended instrument, geared toward human/machine improvisation. You can use picking hand to fret notes, change picking patterns, adjust effects, etc.
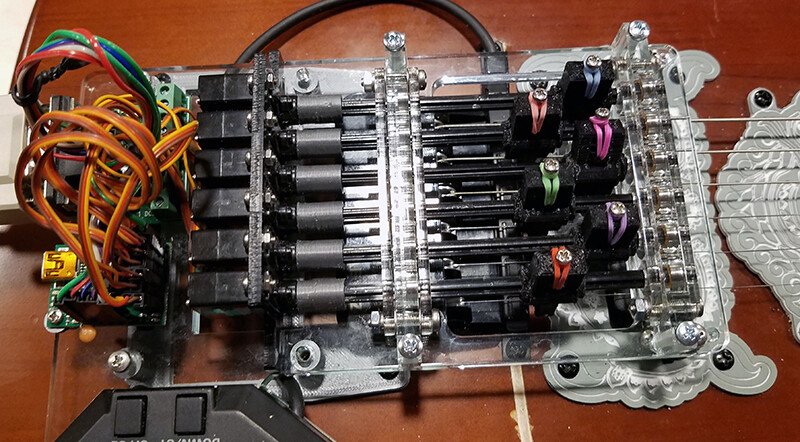
The platform, the support for the servomotors, and the picks were made on a Glowforge. The platform supports and the servo-to-lego-axle couplings were 3D printed. The pickup mount and decorative features were milled and cut on a CNC machine.
The guitar was made in Indonesia, which gave it its name “The Barong.” A Barong is a Balinese temple guardian spirit. The pattern is from a piece of stock art–I have not yet had time to draw my own version.
I designed the circuitry, the picking mechanism and other hardware, and wrote the program that turns MIDI notes into picking patterns. The parts were designed in Adobe InDesign (a product I worked on for years)–I have created scripts that convert InDesign paths to gcode for the CNC-machined parts, and scripts that write OpenSCAD programs for the 3D printing parts.
It’s tons of fun to play with! I’ve spent more than forty years learning to be a passable flatpicking guitarist–this gives me a way to explore fingerpicking patterns that I don’t have another forty years to learn.
Finally, I’d like to thank the late Vonda N. McIntyre for her encouragement and support of this project.
These are not exactly fingerpicking patterns, but here’s a demo video of the older version(s):
This doesn’t show a person playing with it, because I’m a bit shy about that–also, setting up a camera to record yourself is a challenge. The newer version is a great deal better! Once I switched to high-temperature silicone for the picks, and redesigned the pick holders so that they were easier to adjust, the sound improved tremendously.
I will be making videos of the new version in the next few months.
@evansd2 It’ll handle 1/16th notes at 240 beats per minute without too much problem. The key to the timing is the distance that the pick needs to travel to pick the note and then get clear of the string. So the engineering challenge is to find a servo that is a.) strong enough to push the pick past the string (not trivial!), b.) small enough to fit 6 of them on a guitar body, and c.) fast enough to be musically useful. It has taken me years to get to this point. These are PowerHD DSM 44 digital servos–best I’ve found so far.
There’s also an issue with MIDI data buffering in the setup that I have–it’s pretty easy to end up with notes getting dropped. I’m still working on this problem.
I built a version using solenoids that can go a lot faster, but it’s hard to keep the electromagnetic noise of the solenoid actuation out of the audio. I’m still working on that one.
That is crazy cool! I can imagine guitar players who either want to do picks they don’t know, or even a guitar player who doesn’t have the hand strength/dexterity to do that anymore! Looking forward to your follow-up video
@deirdrebeth I’ve thought a lot about how this could help players who’ve lost a limb, or who have lost some use of their hands through age or arthritis.
Really, the control information could come from just about anywhere–I use MIDI patterns from Ableton Live on my computer, but it could be from an EEG or other biofeedback sensor. For that matter, it could be the stock market or a wind sensor. It’s all about how you map the data to the expression on the instrument. (Sorry for geeking out!)
I used to joke that I’d like to use robots like this to start a black metal band with Stephen Hawking, but now it’s too late.